Remember that this is written by an architect. An architect that is not interested in reading technical manuals, or do to many preparations. So this is not a review. It is more a list of thoughts:)

Trimble DPI-8
I have tested the Trimble DPI-8 scanner for 24 hours now, and it is time to make a summary of my experience. But first of all, what kind of scanner is the DPI-8? The scanner is an handheld scanner that weight about a kilo so it is just light enough to be held with one hand. The other hand can easily operate the touchscreen when you are configuring the scan. The touchscreen is in fact a pad that runs on Android, and on the back of the pad there is attached to a scanner and a camera. They are connected to the pad with an micro USB cable. It seems fairly well built, but at the same time it is just basic components that is connected together. Why not? And why should you be interested in this scanner?
As an architect, I sometimes get comments from the entrepreneurs that I should be more on the construction site to see how it is actually being built. And there is nothing more I want to do, but the construction time is so cramped and I have to prioritize my time very carefully. In addition when I ask for surveys for my detaildrawings, they do not manage to survey them in time before my deadline. Yes we are talking about the importance of collaborating together in a multidisciplinary BIM model, with the benefits of clash detection etc. But there is little talk about how to gather information during construction time.
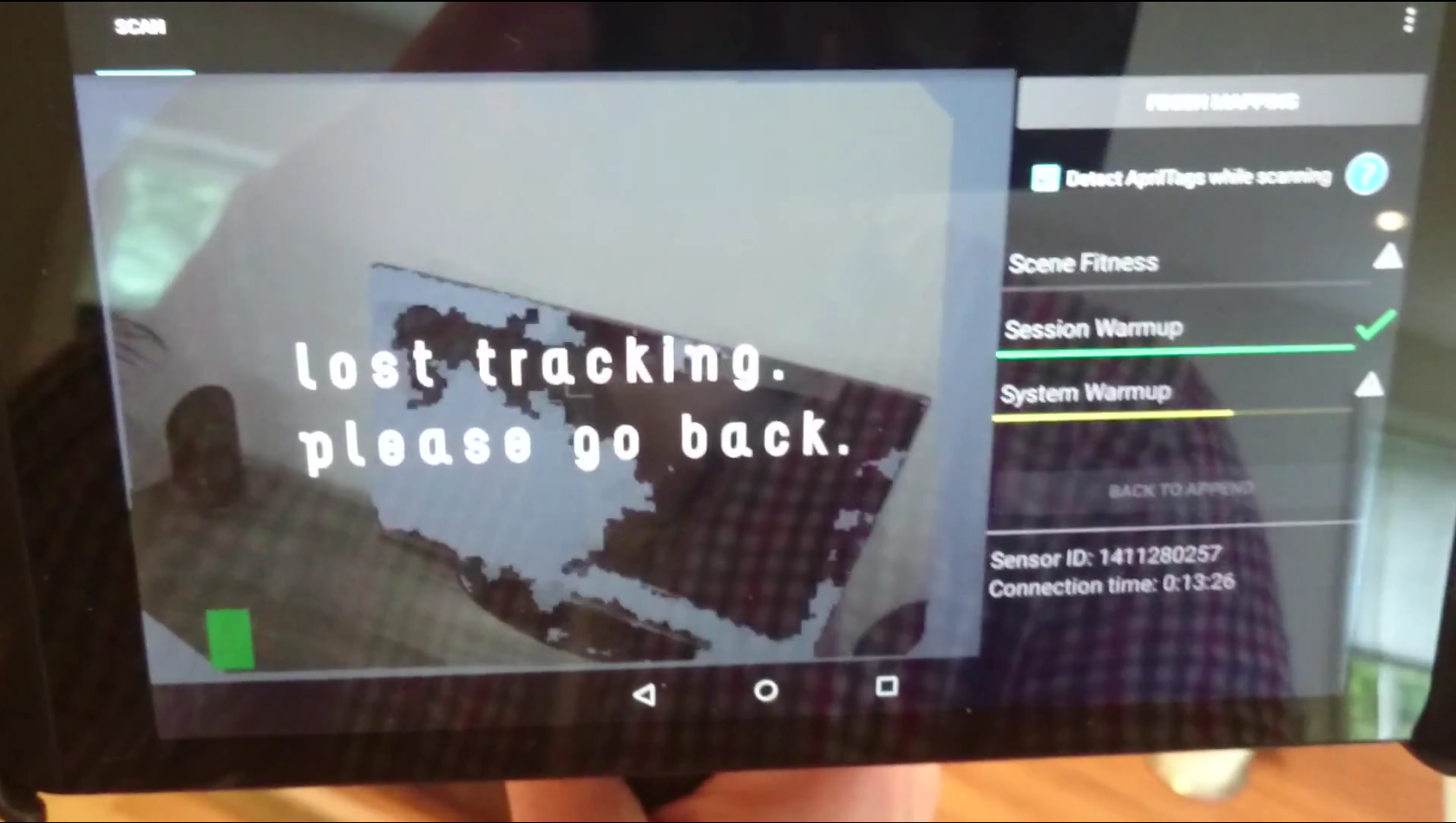
Sometimes you are a bit lost…
Here is where we can improve by using new techniques of building data capture, with more efficient collaboration processes. That is why I see a lot of potential in the DPI-8. It is not perfect, and in many ways it feels like the first generation of this type of scanner, but it gives an great insight in how the future of handheld/robot scanning should be. And I am looking forward seeing all the technology that is pushing in this direction, with Google tango and Intel pushing each other.

…but usually you are on track
Okay. The DPI-8 is intuitive. The software is an app and it is pretty straight forward. I did not miss any functionality during my limited test period and the software seemed rather stable. Regarding the scanning, there was a steep learning curve but not in a frustrating way. The information that is displayed on the screen during the scan is constantly giving you feedback how you should proceed scanning, and what area you have scanned so far. If it is displays as green you have a good scan of that area, and if it is yellow you have a medium good scan. And the best part is actually that you can study your scan immediately after the scan is done on the pad. This way, you can see if you have a successful scan before you leave the construction site.
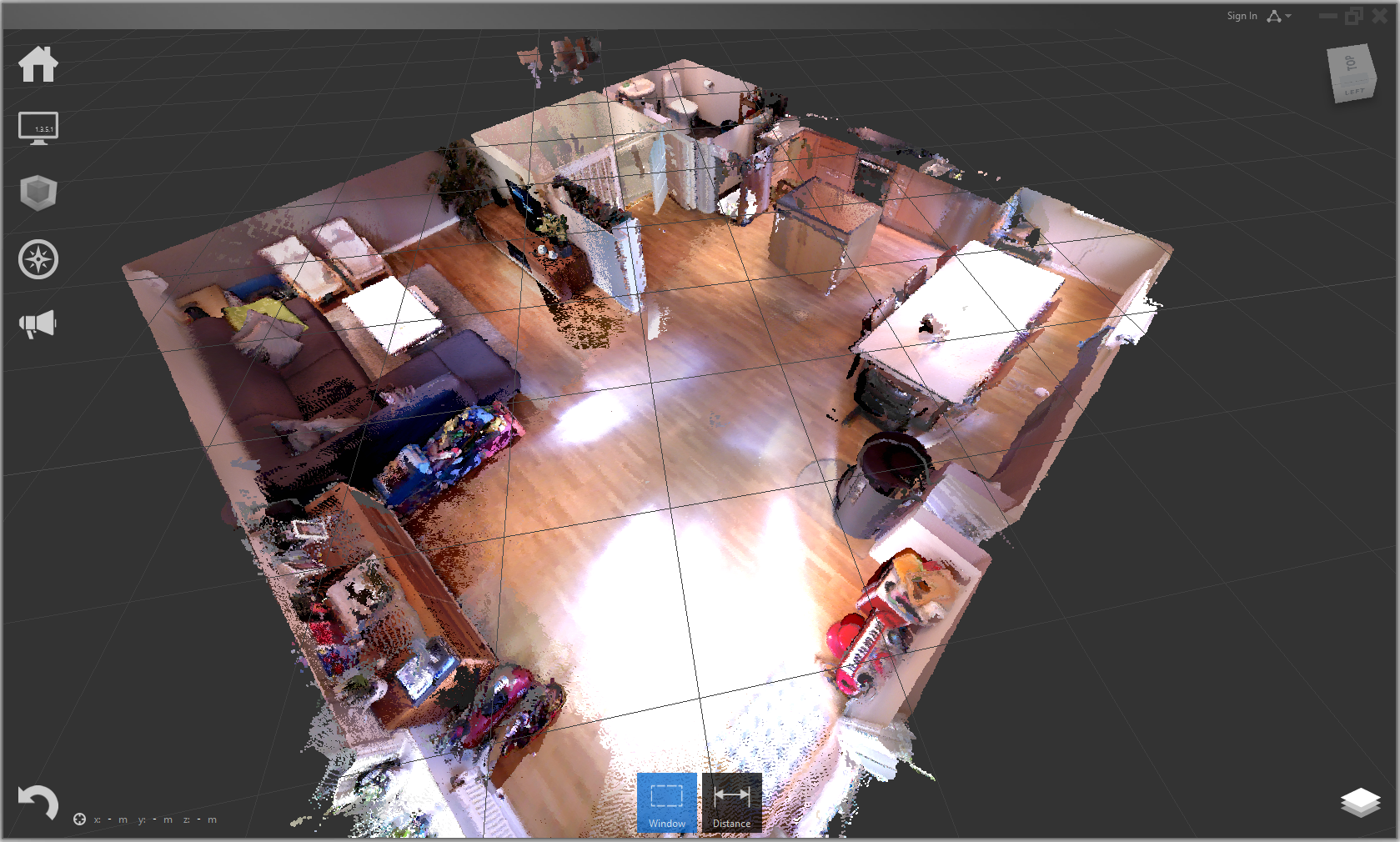
Point cloud in Recap based on four DPI-8 scans
The software offers different export formats and during my test period, I ended up exporting to PTS and imported this to Recap. I tried to import it directly to Revit, but while indexing the point cloud, it failed halfway. Other remarks in a randomly order:
- scanning and exporting drains the battery. Make sure it is fully charged
- since the memory is (too) small during scanning, you have to «divide» your scans. The is an option called «append» that let you use the same origo as the previous scan. It works surprisingly well.
- It is a little bit confusing the difference between «scene», «session» and «export»
- this scanner do not work in strong daylight
- go slooowly. Or else you will «loose track»
- when transferring files from the pad, to the PC be careful! I experienced multiple severe windows crashes
- when scanning mirrors, you can get some funny results
- read more about the accuracy of the scanner on Trimble webpage. I have not compared it to my results yet.
Yes I have used the scanner only one long day and night… But finally I could play with a gadget that actually made sense. I had great fun testing the scanners limits and I am wondering if this scanner should be a standard equipment for an architect firm? Maybe for architect firms that do a lot of refurbishment? The future is exciting and I am looking forward seeing the construction site being scanned live and continuously with robots or fixed scanners in every room.
They are becoming cheap and I want one!
PS! Special thanks to Geomatikk Survey who let me test the DPI-8, and to Margarida Jerónimo Barbosa who gave me valuable feedback on my post
Update 05.07.2015: The scanner is owned by the Norwegian University of Life Sciences for research purpose but have been sponsored by Geomatikk Survey
